My work on the graph bot ended up veering a bit from my initial plans — rather than constrain several automatons via lengths of string, I worked instead towards a group of drawing machines that would chart their course through a room by excreting yarn in their wake.
The intention was to capture both the crisscross of attention in and to visualize larger patterns in the geographic distribution of activity on the web.
Although I eventually became less and less convinced of the conceptual merits of the project (for which I have no one to blame but myself), it was nevertheless a useful exercise in combining techniques from a number of disciplines.
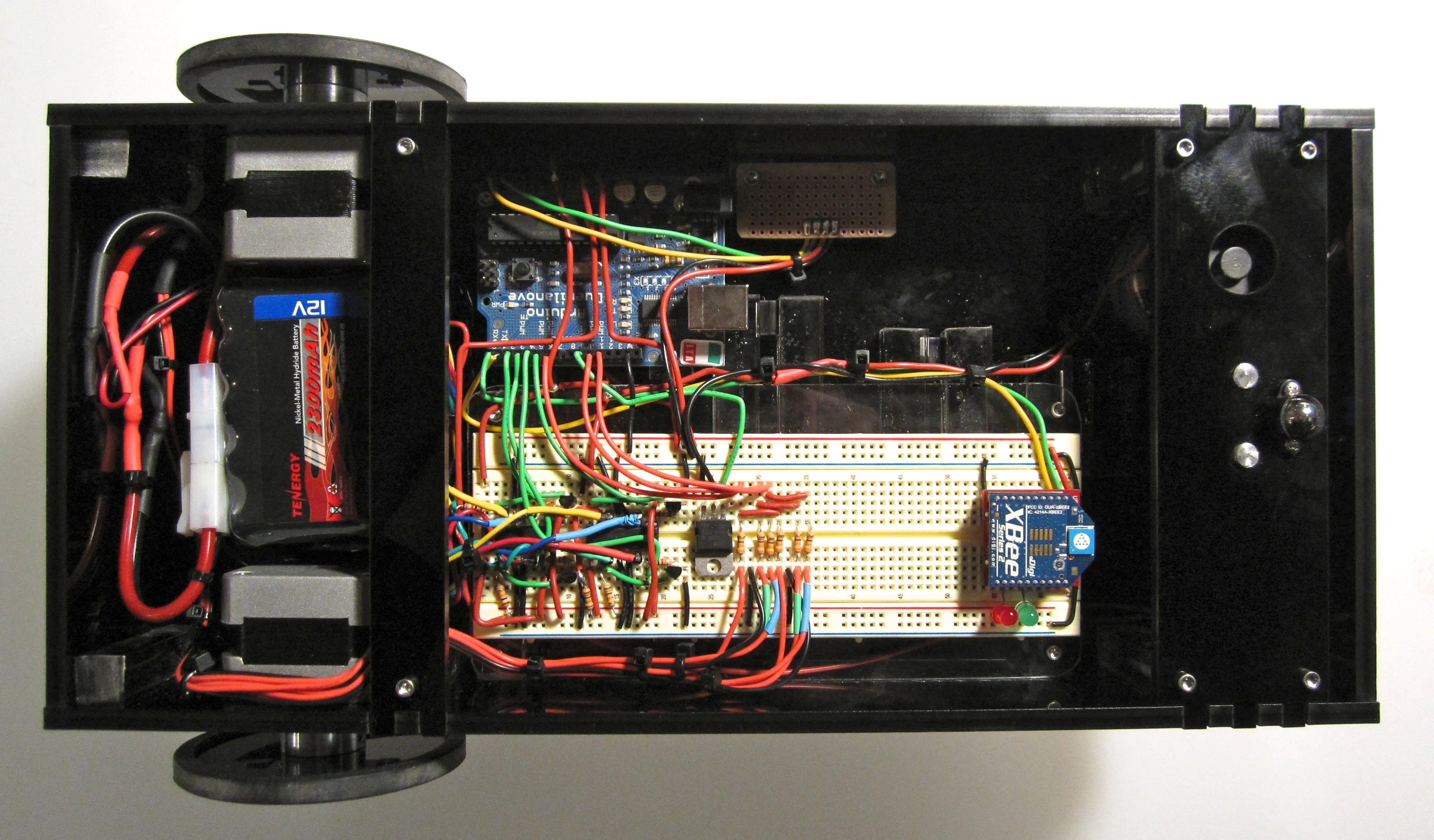
A picture of the device’s guts, is I suppose, an appropriate place to start since I spent an inordinate amount of time on this aspect of the project, chasing down minor details rather than reconsidering a more elegant approach to the entire concept.
Here’s how the project’s requirements break down:
- A mobile robot platform, associated circuit building and firmware development, a rudimentary navigation system, wireless communication and power.
- A yarn storage and excretion mechanism that can reliably dole out yarn at a range of speeds.
- Centralized control software and associated connections to live data sources on the web.
More to come on the process and discoveries made along the way.