Next came the servo lab.
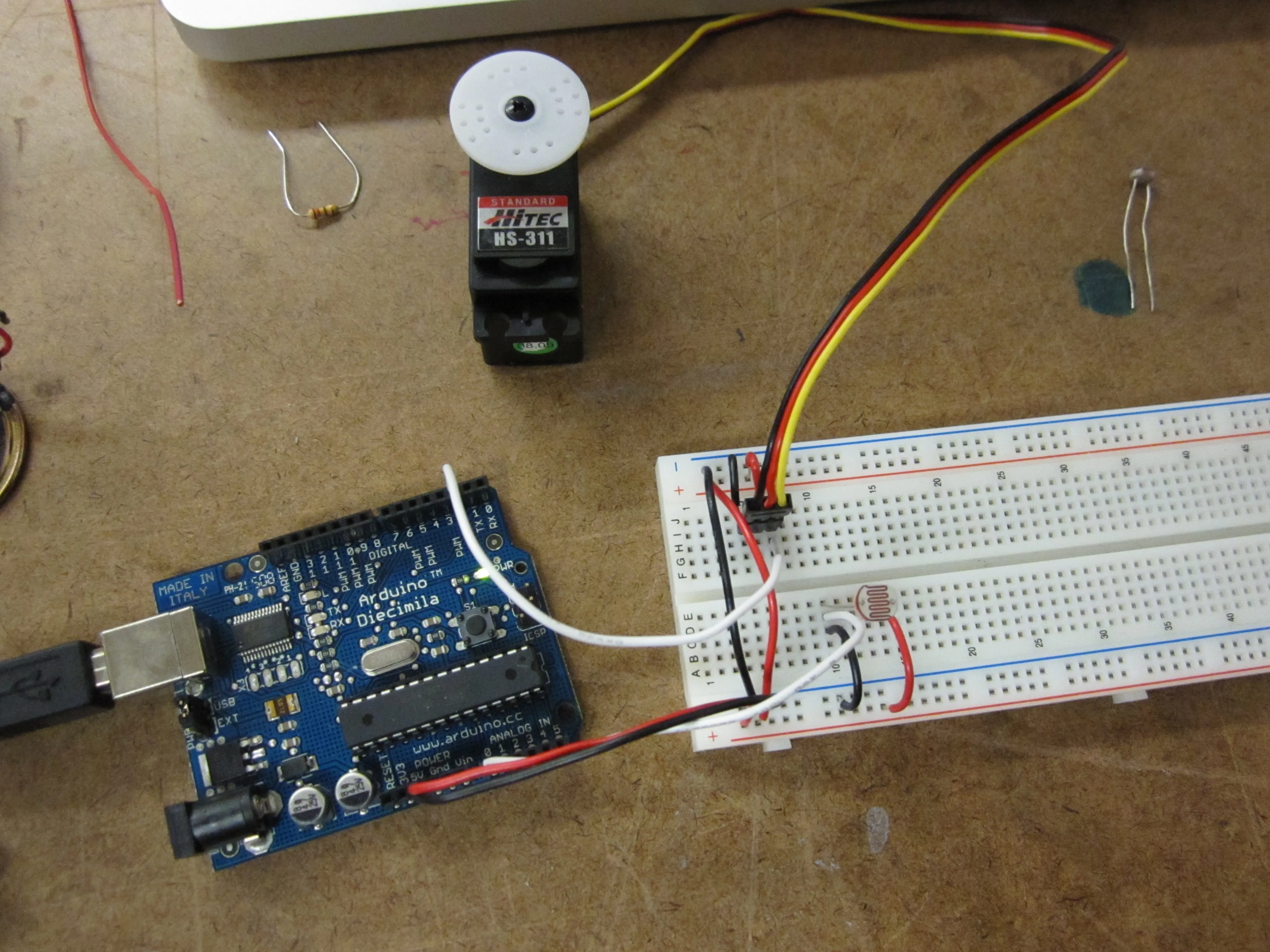
I ended up using an LDR as an analog input to set the position of the servo.
Then I switched to a pot for finer control over the servo position. Worked great as a makeshift camera panning platform:
Update: The old long-form pulse method ended up being really useful, since my Digital Combination Lock needed to use a servo and the tone library at the same time. It turns out that both the servo library and the tone library use up the Arduino’s available timers… so the only way to use both simultaneously was to fall back to the pulse method outlined in 4.1.